In this new program, we create two tasks that are always running. When task 1 is created, it has a higher priority than task 2, so theoretically, it should always occupy the "Running" state. However, upon examining the screen output, we see that this is not the case because task 1 itself elevates the priority of task 2, allowing task 2 to enter the "Running" state. Task 2 then reduces its own priority below that of task 1, causing task 1 to start running again, and the cycle repeats continuously.
Code Example:
#include "bsp.h"
static TaskHandle_t xTask2Handle; /* Variable to store task Priority */
static void vTask1( void *pvParameters ); /* Declaration of Task 1 function */
static void vTask2( void *pvParameters ); /* Declaration of Task 2 function */
int main( void )
{
HAL_Init( );
/*enable RTT and system view*/
SEGGER_SYSVIEW_Conf( );
SEGGER_SYSVIEW_Start( );
xTaskCreate(vTask1, "task1", 240, NULL, 2, NULL); /* Register on Kernel Task1 with a priority of 2 */
xTaskCreate(vTask2, "task2", 240, NULL, 1, &xTask2Handle); /* Register on Kernel Task2 with a priority of 1 and pass a parameter TaskHandler */
vTaskStartScheduler(); /* Execute the kernel */
}
static void vTask1( void *pvParameters )
{
UBaseType_t uxPriority; /* Variable to sotre the current priority */
uxPriority = uxTaskPriorityGet( NULL ); /* Extract the task priority */
for(;;)
{
SEGGER_RTT_printf( 0, "Tarea 1 ejecutandose\n" ); /* Print a message of execution of task in Terminal */
SEGGER_RTT_printf( 0, "Aumentando prioridad de Tarea 2\n" ); /* Print a message of change priority to Terminal */
vTaskPrioritySet( xTask2Handle, (uxPriority + 1) ); /* Increment Task priority of Task 2 above Task 1 */
}
}
static void vTask2( void *pvParameters )
{
UBaseType_t uxPriority; /* Variable to sotre the current priority */
uxPriority = uxTaskPriorityGet( NULL ); /* Extract the task priority */
for(;;)
{
SEGGER_RTT_printf( 0, "Tarea 2 ejecutandose\n" ); /* Print a message of execution of task in Terminal */
SEGGER_RTT_printf( 0, "Disminuyendo la prioridad de la Tarea 2\n" ); /* Print a message of change priority to Terminal */
vTaskPrioritySet( NULL, (uxPriority - 2)); /* Decrease the Task priority 2 values */
}
}In the file FreeRTOSConfig.h, identify the following lines and change their values from zero to one:
#define INCLUDE_uxTaskPriorityGet 1
#define INCLUDE_vTaskPrioritySet 1Task 1 can modify the priority of task 2 using a "Task Handler." This task handler is assigned to task 2 when the task is created, as seen in the sixth parameter of the xTaskCreate function. Whenever a task needs to modify its behavior based on others, it must have an assigned "Handler."
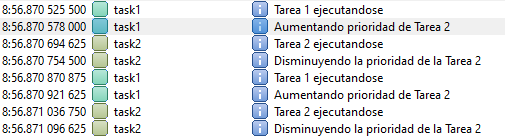
SystemView Output
Terminal shows the Task 1 execution to after increasing the priority of Task 2 which is executed after, changing his own priority to execute Task 1 again.
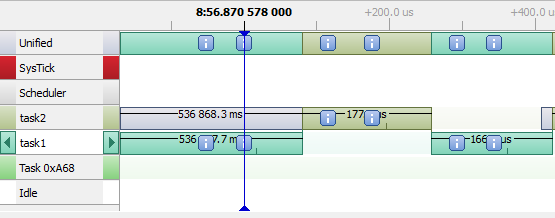
TimeLine:
The timeline shows the task execution, where first Task1 is executed because has the higher priority, inside Task 1 priority of Task 2 is increased a value above that Task 1.
The new priority of the task allows it to be executed when Task 1 ends. When Task 2 starts execution, the task prints a message to after increase to the default value of priority. Executing Task 1 again.